
VES-EL - Design: Gareth Neal & Zaha Hadid
În ultimii ani, putem observa un interes crescând al domeniilor creative pentru potențialul de utilizare al roboților industriali ca parteneri în procesul creativ. Roboții industriali au devenit interesanți pentru domeniul creativ datorită caracterului lor multifuncțional și, de asemenea, pentru posibilitatea de dezvoltare a aplicațiilor diferite. În loc de mai multe mașini specializate, se poate folosi un singur robot ce poate fi echipat cu o varietate mare de unelte, de end-efectori. Astfel, prin folosirea aceleiași mașini, dar cu unelte diferite, ne apropiem de procesul tradițional de producție, unde mâna meșterului schimba uneltele în funcție de necesitate1.
Prin integrarea fabricației în procesul de design nu se urmăresc doar rațiuni de eficiență legate de reducerea timpului sau a pașilor de trecere de la proiect la construcție2. Intenția este aceea de a realiza un feedback continuu între intenția de proiect și logica de fabricație. Chiar dacă practica de arhitectură începe să se orienteze către materializare, acest lucru nu înseamnă că se concentrează pe obiectul produs. Nu ar trebui să ne preocupe doar cum fabricăm lucruri, ci de a găsi noi mijloace de materializare care să extindă domeniul creativ. Abilitățile tehnice ale roboților industriali nu sunt singurele care justifică utilizarea lor, ci includerea acestora în proiect ca factori ce îl influențează motivează această implicare. Nu aspectul hi-tech este relevant pentru proiectare, ci explorarea aplicațiilor sale, transformarea lor în funcție de fiecare situație în parte și înglobarea lor în proiect3.
Robotul industrial a devenit standard în automatizare tocmai pentru că, precum computerul personal, acesta nu a fost optimizat pentru o singură sarcină, ci poate fi folosit pentru o gamă largă de aplicații. În loc să fie forțat să funcționeze în parametrii predefiniți, ca o mașină specializată, abilitățile sale pot fi programate de proiectant pentru fiecare situație diferită în parte. Astfel, procesul de proiectare include feedback la logica de comportare a materialului și a modului de materializare.
Explorările idz arhitectură în fabricația robotică
Roboții industriali sunt cele mai versatile unelte ce pot fi controlate numeric, folosind mediul computațional. De aceea, ei sunt foarte potriviți practicilor creative, ce presupun, de cele mai multe ori, dezvoltarea de proiecte unice.
Odată cu utilizarea roboților industriali în design, vine și nevoia de proiectare a modului în care aceștia sunt folosiți. Recent, au început să apară unelte din ce în ce mai accesibile pentru cei care nu au studii aprofundate de programare, de control al roboților. Astfel, rolul proiectantului se transformă, primind și responsabilități de programare, iar uneltele de fabricație devin parte din proiect și pot fi folosite în avantajul acestuia.
Explorările studioului nostru din domeniul fabricației robotice au caracter de cercetare și au scopul de a testa flexibilitatea roboților industriali. Aplicațiile nu urmăresc întotdeauna fabricarea unor obiecte, ci folosirea acestor unelte în alte moduluri decât cele pentru care au fost inițial create.
ROBO_CRAFT este o serie de proiecte de cercetare, a studioului idz arhitectură, care își propune să exploreze utilizarea roboților industriali în creația și fabricația de artefacte arhitecturale. Cercetarea se axează pe folosirea unui robot industrial ABB IRB140 și pe testarea potențialului lui creativ în proiectare, prin aplicații diferite.
ROBO_CRAFT LIGHT
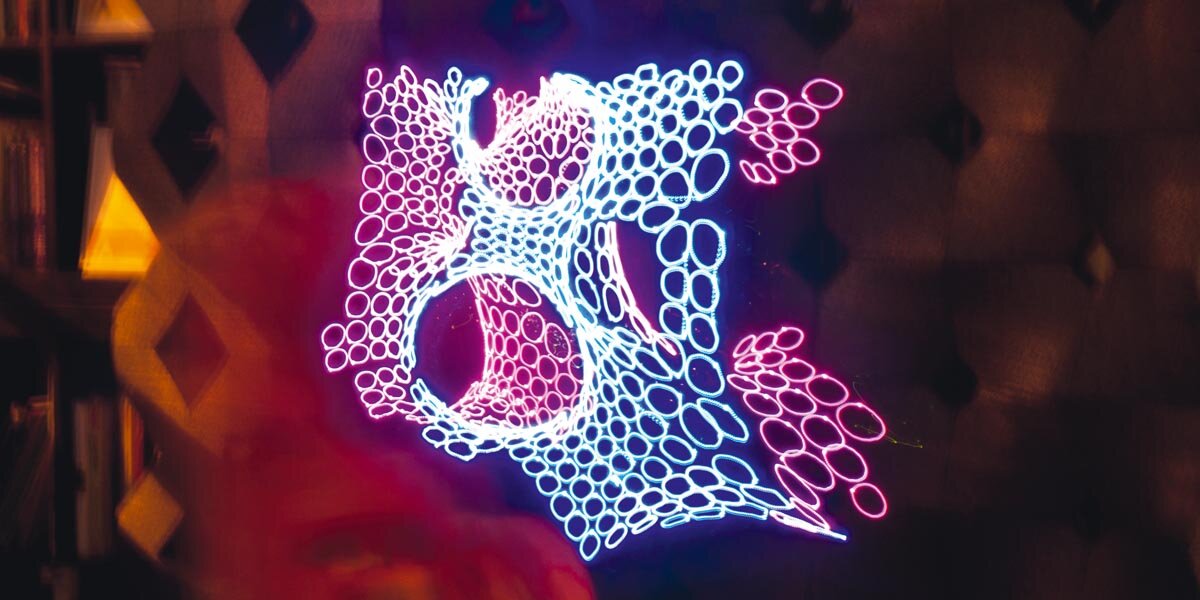
Cel de-al doilea proiect din seria ROBO_CRAFT explorează o nouă aplicație robotică, de această dată desenând cu lumină. Ideea este de a testa capacitatea robotului de a se deplasa la coordonate precise în spațiu, cu o mișcare continuă. În această aplicație, fabricația în sine este una imaterială, rezultatul fiind fotografii realizate cu expunere lungă, care surprind toate pozițiile prin care a fost plimbat LED-ul și schimbările de culoare.
Această aplicație are un proces de lucru care implică numeroase aspecte virtuale. Modelul care urmează să fie reprezentat este generat în mediul virtual, apoi se simulează modul în care mișcă robotul, tot în mediul virtual, ca într-un final să realizeze acele mișcări fizic, dar, de fapt, să genereze tot o imagine în mediul real, dar rămânând virtuală. Avem, astfel, un proces de concepție virtual, un rezultat virtual, dar un proces de fabricație fizic.
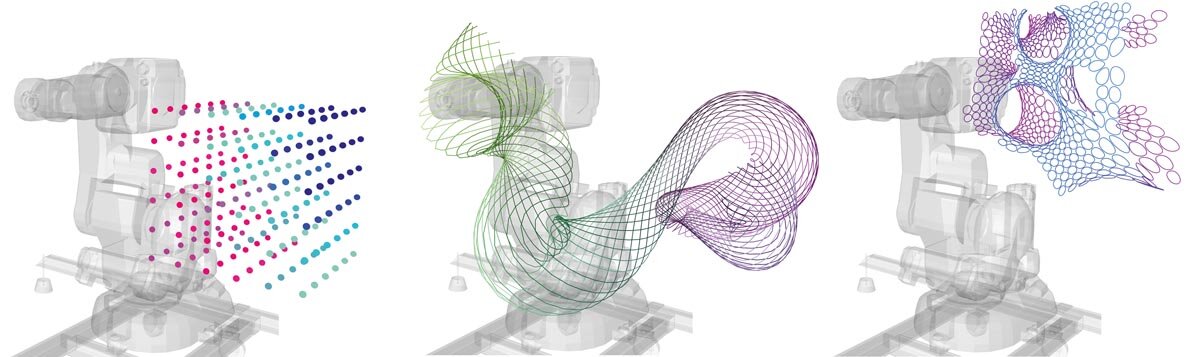
Această aplicație urmărește reprezentarea unei geometrii 3D generate prin proiectare parametrică, în spațiu. Rezultatul este tridimensional, dar efemer, de aceea a trebuit să găsim o metodă de a vizualiza rezultatul. Astfel, desenul în spațiu se realizează prin montarea pe robot a unui LED RGB care își schimă gradat culoarea. Mișcarea este înregistrată prin realizarea de fotografii cu expunere lungă.
Prin folosirea aceluiași mediu atât pentru generarea geometriei, cât și pentru controlul robotului, am reușit să dezvoltăm mai multe tipuri de geometrii ce au putut fi redate prin același proces. Pentru a fi redate eficient, geometria trebuie aproximată prin puncte, linii sau curbe, deoarece desenul de suprafață este greu de realizat cu o sursă de lumină punctuală.
ROBO_CRAFT LIGHT se folosește de capacitatea mașinilor cu control numeric, în acest caz a roboților industriali, de a reda linii și puncte foarte precis în spațiul tridimensional. Pentru această aplicație ne-am construit un accesoriu personalizat, ce constă într-un LED RGB și un microcontroler Arduino.
Am realizat o legătură între controlerul robotului și placa Arduino care comunică informații în limbaj binar. Astfel, putem transmite de la controler la placa Arduino coduri de culoare pentru LED-ul RGB. Am dezvoltat un cod personalizat pentru placa Arduino și am codificat culorile RGB în Grasshopper în limbaj binar, astfel încât să poată fi transmise în ordine într-o combinație de nouă cifre de 0 și 1. Acest lucru se face pentru a atinge o coordonare perfectă între mișcarea robotului și culoarea luminii în punctele din spațiu.
ROBO_CRAFT PAINT
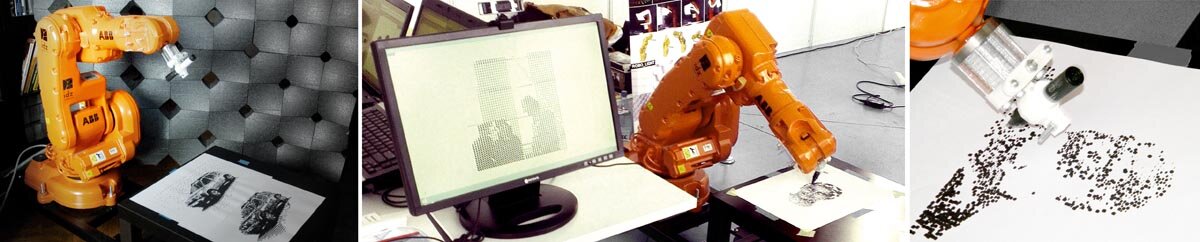
Cel de-al treilea proiect din seria ROBO_CRAFT explorează diferite metode de abstractizare a fotografiilor de tip portret. Punctul de plecare a fost găsirea unei metode prin care să folosim robotul industrial pentru a realiza imagini foto. Imaginile realizate sunt cele ale vizitatorilor din cadrul unui eveniment, astfel, am gândit o aplicație interactivă. După realizarea unei fotografii de tip portret, printr-un proces digital automat, imaginea este prelucrată, se simulează mișcările robotului, după aceea informația este transmisă către controlerul robotului care, în cele din urmă, o desenează într-un timp relativ scurt. Desenul reprezintă o abstractizare a unei imagini reale, unde de fiecare dată robotul se mișcă diferit și realizează un alt portret. Astfel, am încercat să arătăm că roboții industriali se pot folosi altfel decât pentru repetarea unor mișcări intrate într-o rutină.
Prin această aplicație am urmărit să folosim robotul într-un proces care să-l îndepărteze de mediul industrial, cu care este cel mai des asociat. Am intenționat simularea unui proces creativ pentru a arăta că este o unealtă accesibilă și versatilă. Prin implicarea roboților industriali în medii care nu pun accent doar pe eficiență, aceștia pot ajuta la dezvoltarea procesului creativ.
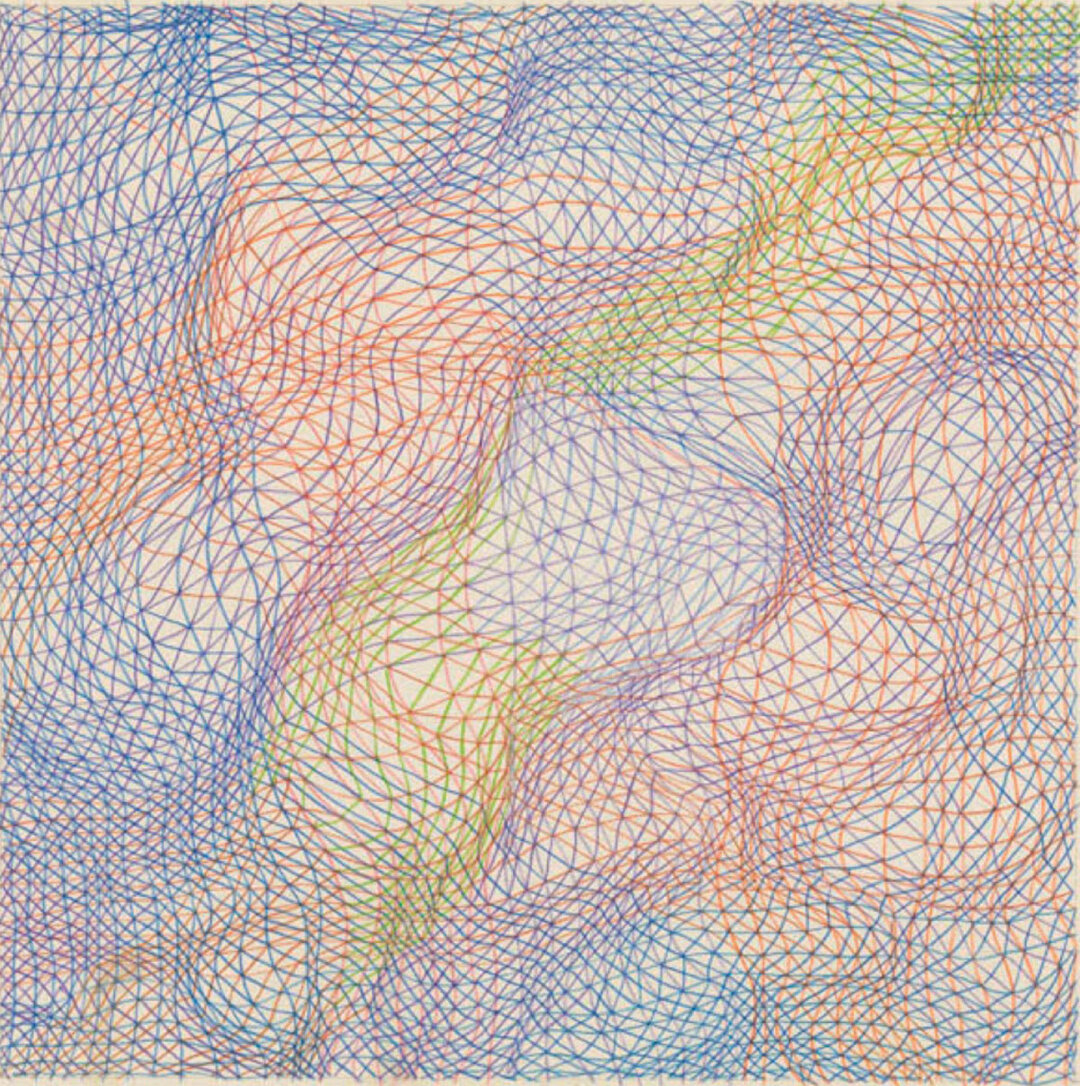
Pe de altă parte, desenele realizate nu sunt foto-realiste, ci sunt trecute printr-un proces digital de transformare, astfel încât să poate fi desenate de robot. Fotografiile sunt abstractizate printr-un algoritm și transformate într-un model geometric.
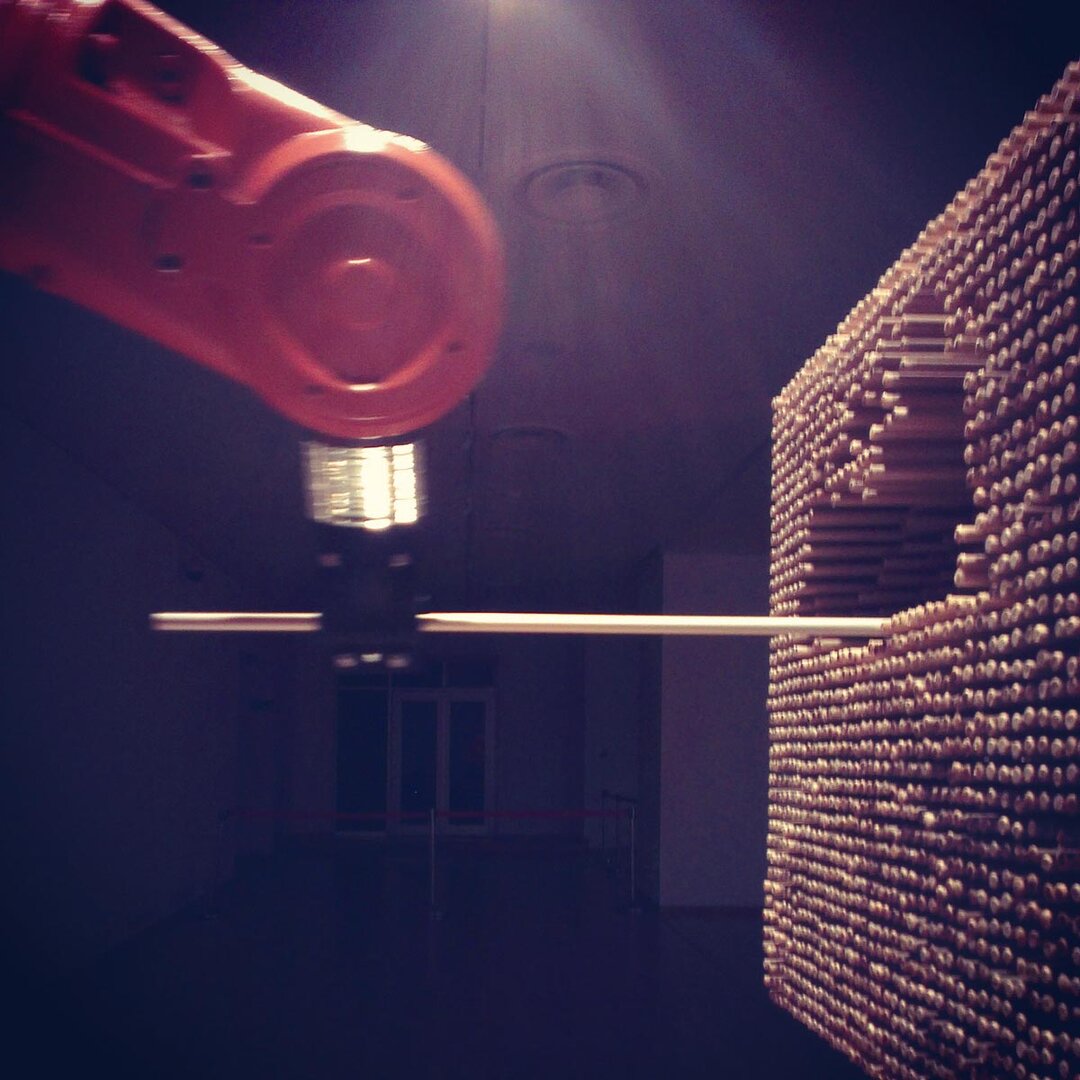
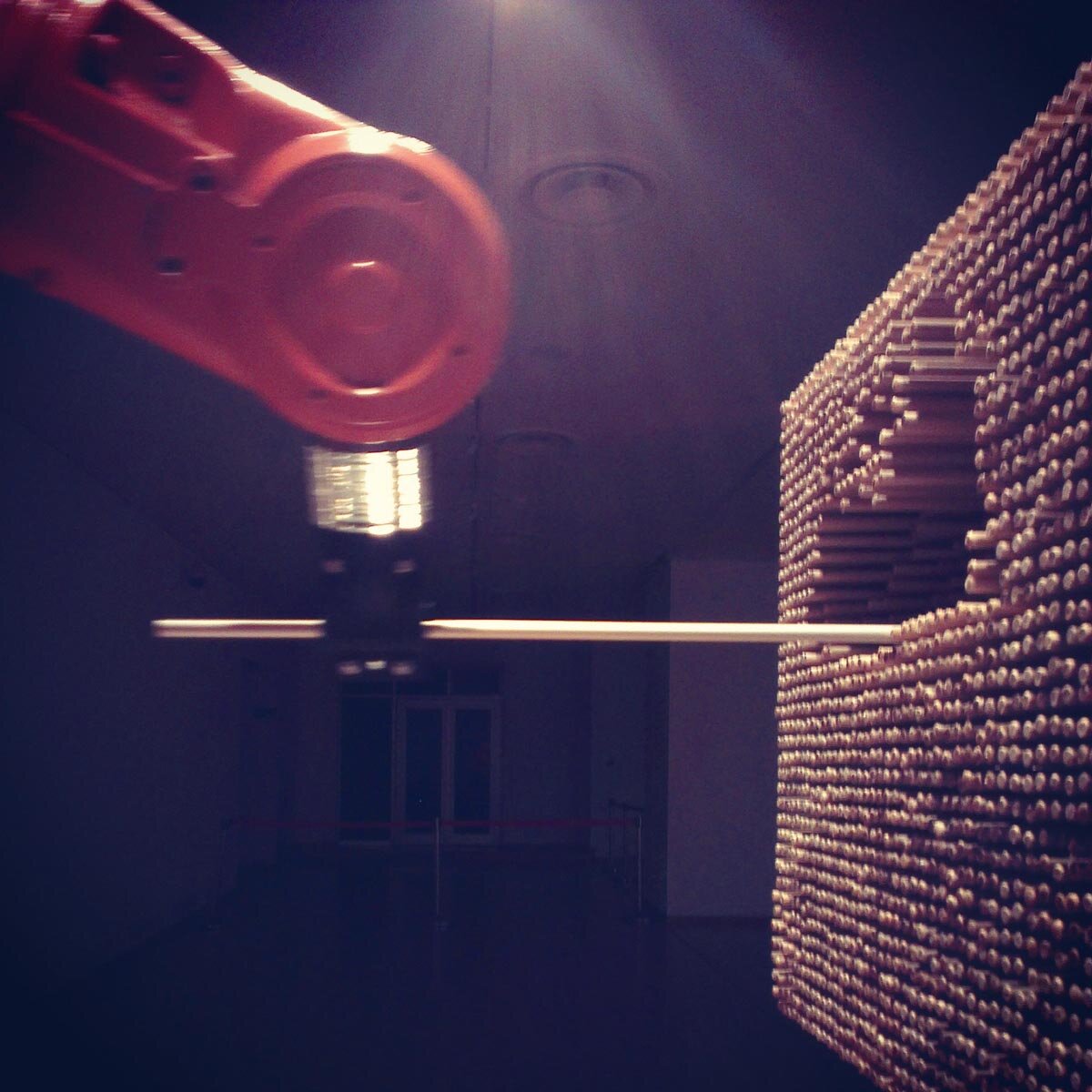
ROBOTIC PIXELS
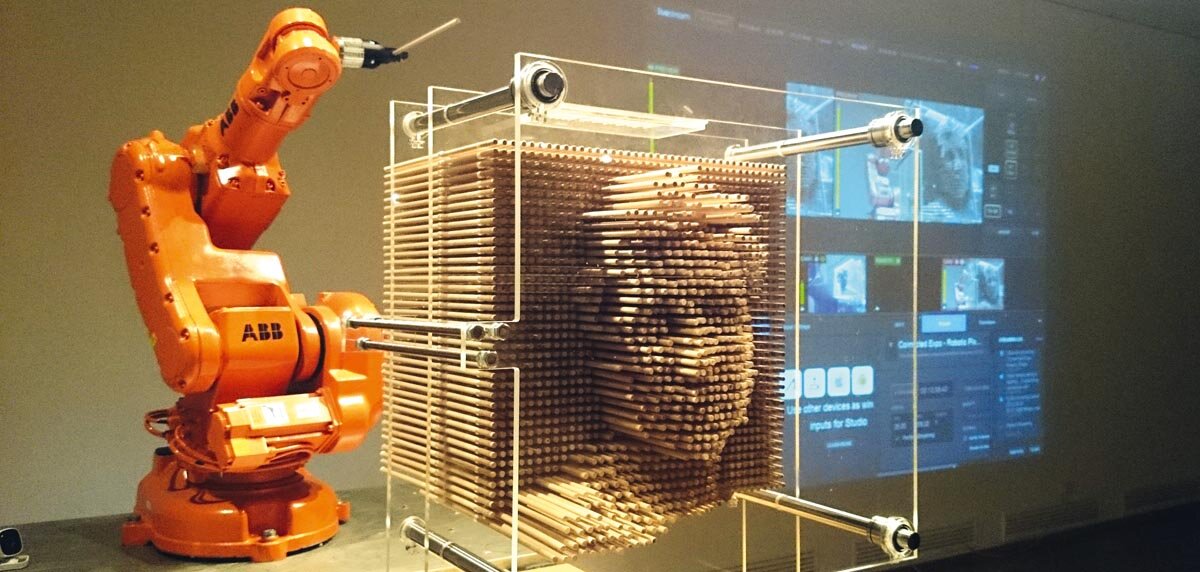
Tehnologia ne ajută să interacționăm, să ne conectăm cu celălalt, să colaborăm în ciuda distanțelor fizice mari între persoane. Legătura creată astfel este, de cele mai multe ori, una de natură virtuală. Instalația Robotic Pixels își propune să unească fizic patru orașe diferite prin intermediul tehnologiei digitale. În acest caz, legătura dintre locuri părăsește mediul virtual și se va manifesta fizic cu ajutorul unui robot industrial.
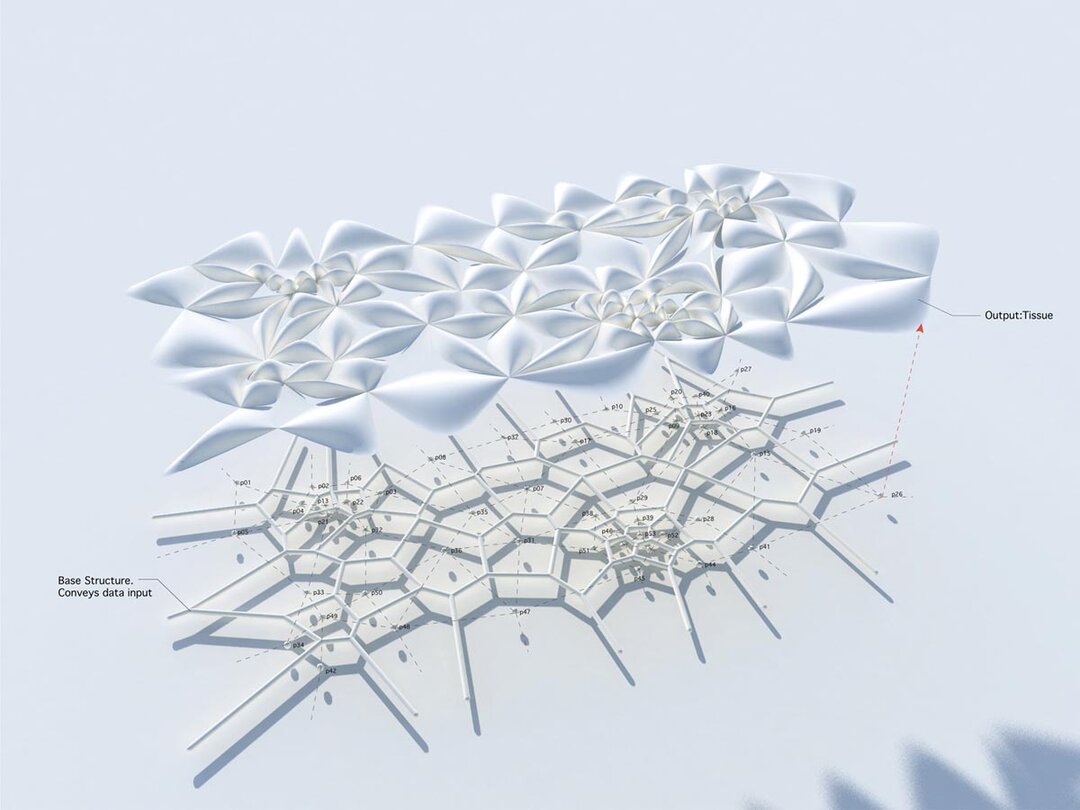
În cadrul instalației Robotic Pixels, locuitorii celor patru orașe vor avea șansa să își transpună fizic prezența în spațiul expoziției din București. Instalația este gândită ca un ciclu închis, activat prin interacțiunea cu utilizatorii. Procesul începe cu transpunerea topografiei feței în mediul virtual prin scanare 3D. Informația este trecută prin filtre specifice digitalului și abstractizată pentru a putea fi preluată de un robot industrial ce va recompune fizic prezența tridimensională în spațiul din București. Bucla conexiunii se închide prin transformarea vizitatorului cu input activ în martor al procesului de rematerializare. Acesta poate vizualiza în timp real mișcările robotului ce duc la formarea imaginii tridimensionale.
Robotic Pixels explorează modul în care omul poate interacționa cu tehnologii industriale ce devin sensibile. Robotul este adaptat și programat pentru a fi folosit într-un mod creativ și deschis comunicării. Deși instalația integrează tehnologii multidisciplinare, accentul se pune pe transformarea activă și conexiunea emoțională. Robotic Pixels încurajează o altfel de experiență de comunicare, provocând relația spațiu-timp prin prezența simultană în mai multe locuri.
Două rânduri de aplicații software asigură funcționarea sistemului, una pentru amplasamentele ce scanează fețele oamenilor prin intermediul unor senzori Kinect și o aplicație centrală cu rol de server care procesează datele primite de la celelalte aplicații și trimite informația de mișcare robotului industrial. Pe controllerul robotului este o a treia parte software care interpretează informația de mișcare și acționează mâna robotică.
NOTE
1 Sigrid Brell-Cokcan și Johannes Braumann (ed.), „Introduction”, în Rob|Arch 2012: Robotic Fabrication in Architecture, Art and Design, New York: Springer, p. 8.
2 David Pigram, Iaim Maxwell, Wes Mcgee, Ben Hagenhofer-Daniell și Lauren Vasey, „Protocols, Pathways and Production”, în Rob|Arch 2012: Robotic Fabrication in Architecture, Art and Design, ed. Sigrid Brell-Cokcan și Johannes Braumann, New York: Springer, p. 147.
3 Dana Tănase și Ionuț Anton, „Influența uneltelor digitale asupra arhitecturii”, în „Arhitectura”, nr. 2/2014, p. 77.