VES-EL - Design: Gareth Neal & Zaha Hadid
In recent years, we can observe a growing interest from creative fields in the potential of using industrial robots as partners in the creative process. Industrial robots have become interesting for the creative field because of their multifunctional character and also for the possibility to develop different applications. Instead of several specialized machines, a single robot can be used that can be equipped with a wide variety of tools, end-effectors. In this way, by using the same machine but with different tools, we move closer to the traditional manufacturing process, where the craftsman's hand changes tools according to need1.
Integrating manufacturing into the design process is not just about efficiency in terms of reducing the time or steps from design to construction2. The intention is to achieve continuous feedback between design intent and manufacturing logic. Even if architectural practice starts to move towards materialization, this does not mean focusing on the object produced. We should not only be concerned with how we make things, but with finding new means of materialization that extend the creative domain. It is not only the technical abilities of industrial robots that justify their use, but their inclusion in the project as influencing factors motivates this involvement. It is not the hi-tech aspect that is relevant to the design, but the exploration of its applications, their transformation according to each situation and their incorporation into the project3.
The industrial robot has become the standard in automation precisely because, like the personal computer, it has not been optimized for a single task but can be used for a wide range of applications. Instead of being forced to operate within predefined parameters like a specialized machine, its abilities can be programmed by the designer for each different situation. Thus, the design process includes feedback to the logic of material behavior and mode of materialization.
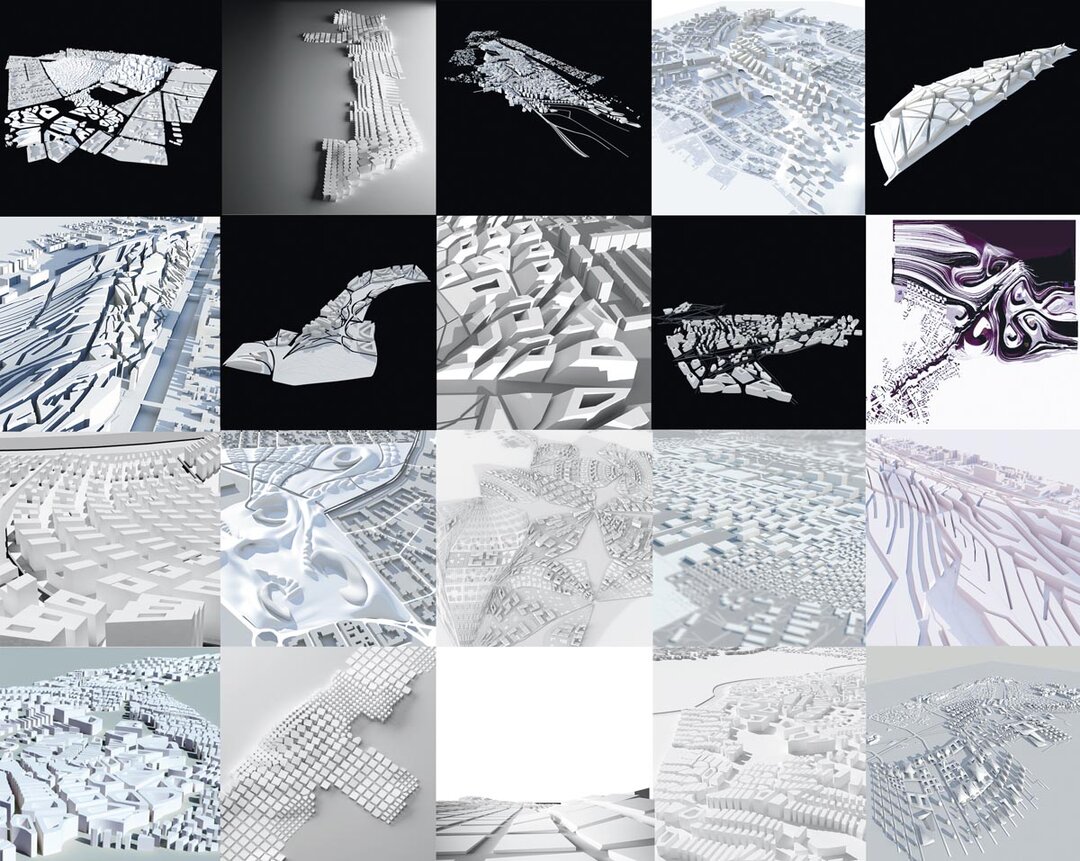
Explorations of idz architecture in robotic manufacturing
Industrial robots are the most versatile tools that can be numerically controlled using computational environment. Therefore, they are well suited for creative practices, often involving the development of unique designs.
With the use of industrial robots in design comes the need to design how they are used. Recently, tools have begun to appear that are increasingly accessible to those who do not have an in-depth background in programming, controlling robots. Thus, the role of the designer is transforming, taking on programming responsibilities as well, and manufacturing tools are becoming part of the design and can be used to the design's advantage.
Our studio's explorations in the field of robotic manufacturing are research-oriented and aim to test the flexibility of industrial robots. The applications do not always aim to manufacture objects, but to use these tools in other modules than those for which they were originally designed.
ROBO_CRAFT is a series of research projects, by idz architecture studio, that aims to explore the use of industrial robots in the creation and fabrication of architectural artifacts. The research focuses on using an ABB IRB140 industrial robot and testing its creative design potential through different applications.
ROBO_CRAFT LIGHT
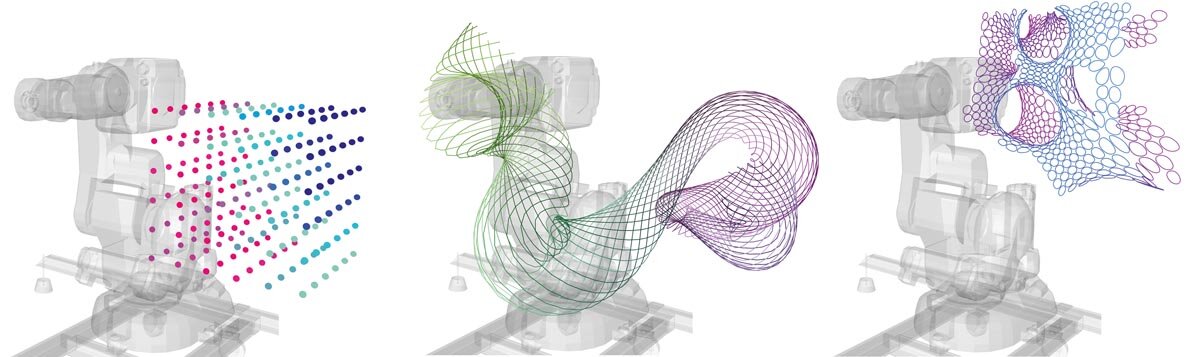
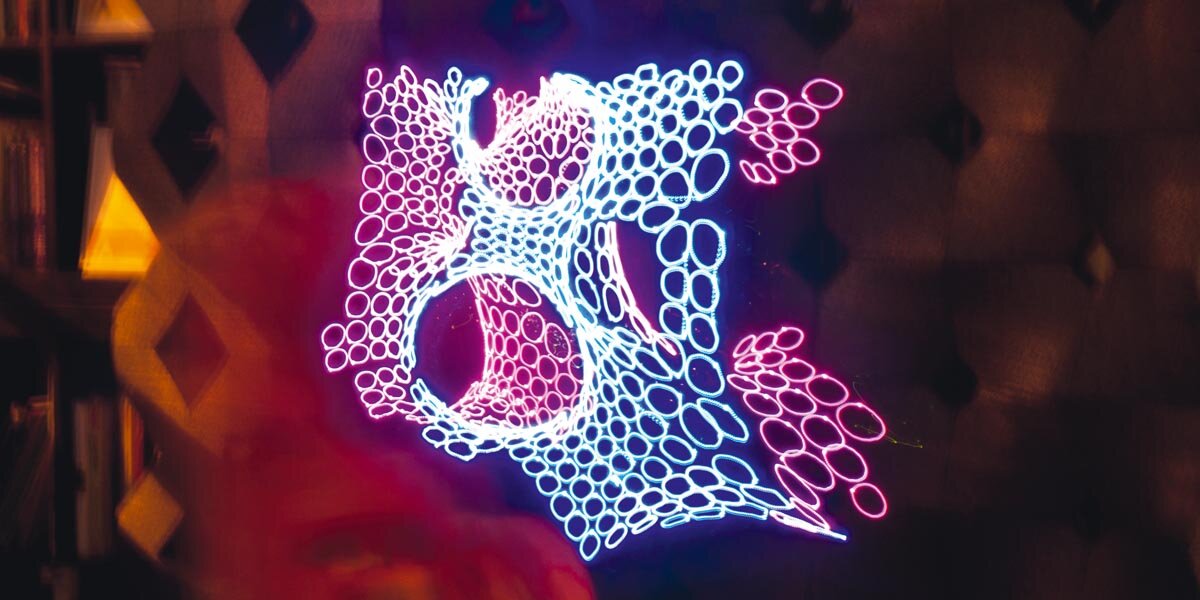
The second project in the ROBO_CRAFT series explores a new robotic application, this time drawing with light. The idea is to test the robot's ability to move at precise coordinates in space with continuous motion. In this application, the fabrication itself is immaterial, resulting in long-exposure photographs that capture all the positions the LED has been walked through and the color changes.
This application has a working process involving many virtual aspects. The model to be represented is generated in the virtual environment, then it simulates how the robot moves, also in the virtual environment, to finally realize those movements physically, but in fact still generate an image in the real environment, but remaining virtual. So we have a virtual design process, a virtual result, but a physical manufacturing process.
This application aims to represent a 3D geometry generated by parametric design in space. The result is three-dimensional but ephemeral, so we had to find a way to visualize the result. So the drawing in space is achieved by mounting an RGB LED on the robot that gradually changes color. The movement is recorded by taking long exposure photographs.
By using the same environment for both geometry generation and robot control, we were able to develop several types of geometries that could be rendered by the same process. To be rendered efficiently, the geometry must be approximated by points, lines or curves, since surface drawing is difficult to realize with a point light source.
ROBO_CRAFT LIGHT takes advantage of the ability of numerically controlled machines, in this case industrial robots, to render lines and points very accurately in three-dimensional space. For this application we built a custom accessory consisting of an RGB LED and an Arduino microcontroller.
We realized a link between the robot controller and the Arduino board that communicates information in binary language. Thus, we can transmit color codes for the RGB LED from the controller to the Arduino board. We developed a custom code for the Arduino board and encoded the RGB colors in Grasshopper in binary language, so that they can be transmitted in order in a nine-digit combination of 0 and 1. This is done to achieve perfect coordination between the robot's movement and the color of the light at points in space.
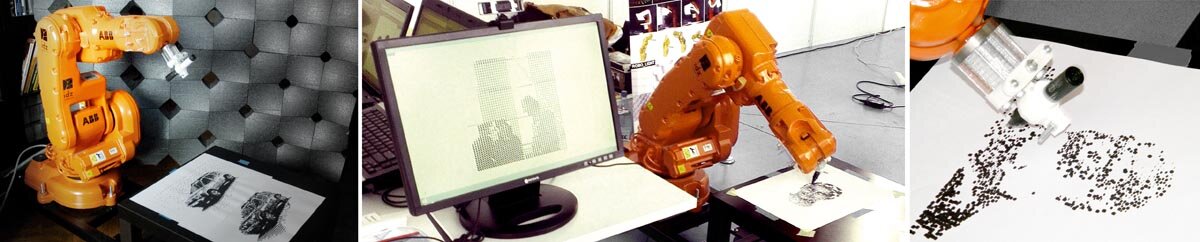
ROBO_CRAFT PAINT
The third project in the ROBO_CRAFT series explores different ways of abstracting portrait photographs. The starting point was to find a way to use industrial robots to make photo images. The realized images are those of visitors at an event, thus, we designed an interactive application. After taking a portrait photo, through an automatic digital process, the image is processed, the movements of the robot are simulated, then the information is transmitted to the robot controller which finally draws it in a relatively short time. The drawing is an abstraction of a real image, where each time the robot moves differently and realizes a different portrait. In this way, we tried to show that industrial robots can be used for other purposes than the repetition of routinized movements.
With this application, we aimed to use the robot in a process that removes it from the industrial environment with which it is most often associated. We intended to simulate a creative process to show that it is an accessible and versatile tool. By involving industrial robots in environments that don't only emphasize efficiency, they can help the creative process to flourish.
On the other hand, the drawings produced are not photo-realistic, but are put through a digital transformation process so that they can be drawn by the robot. The photos are abstracted by an algorithm and transformed into a geometric model.
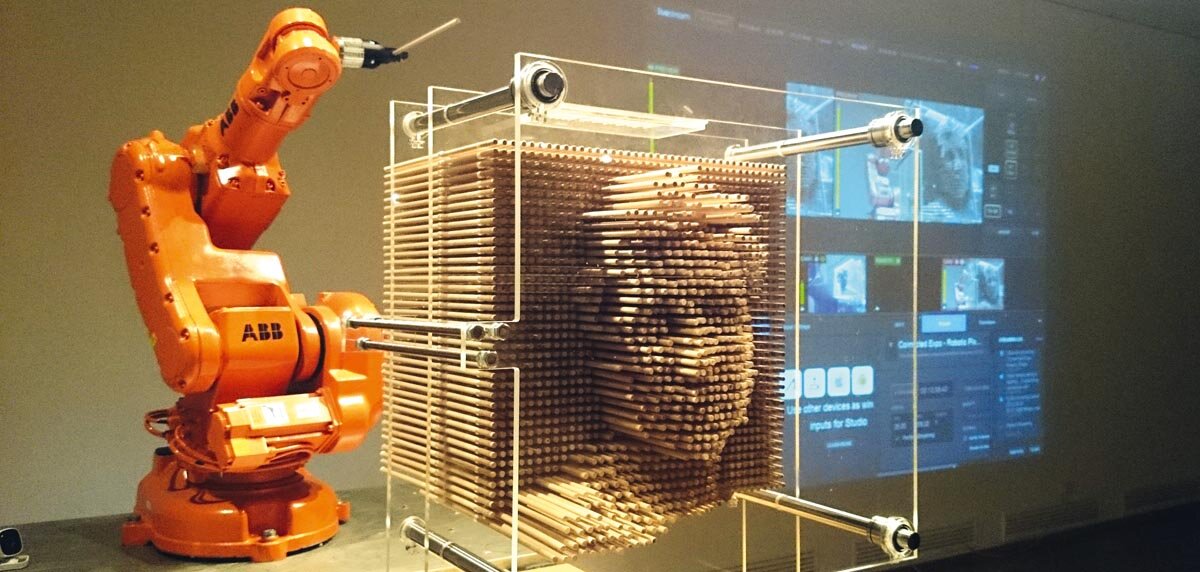
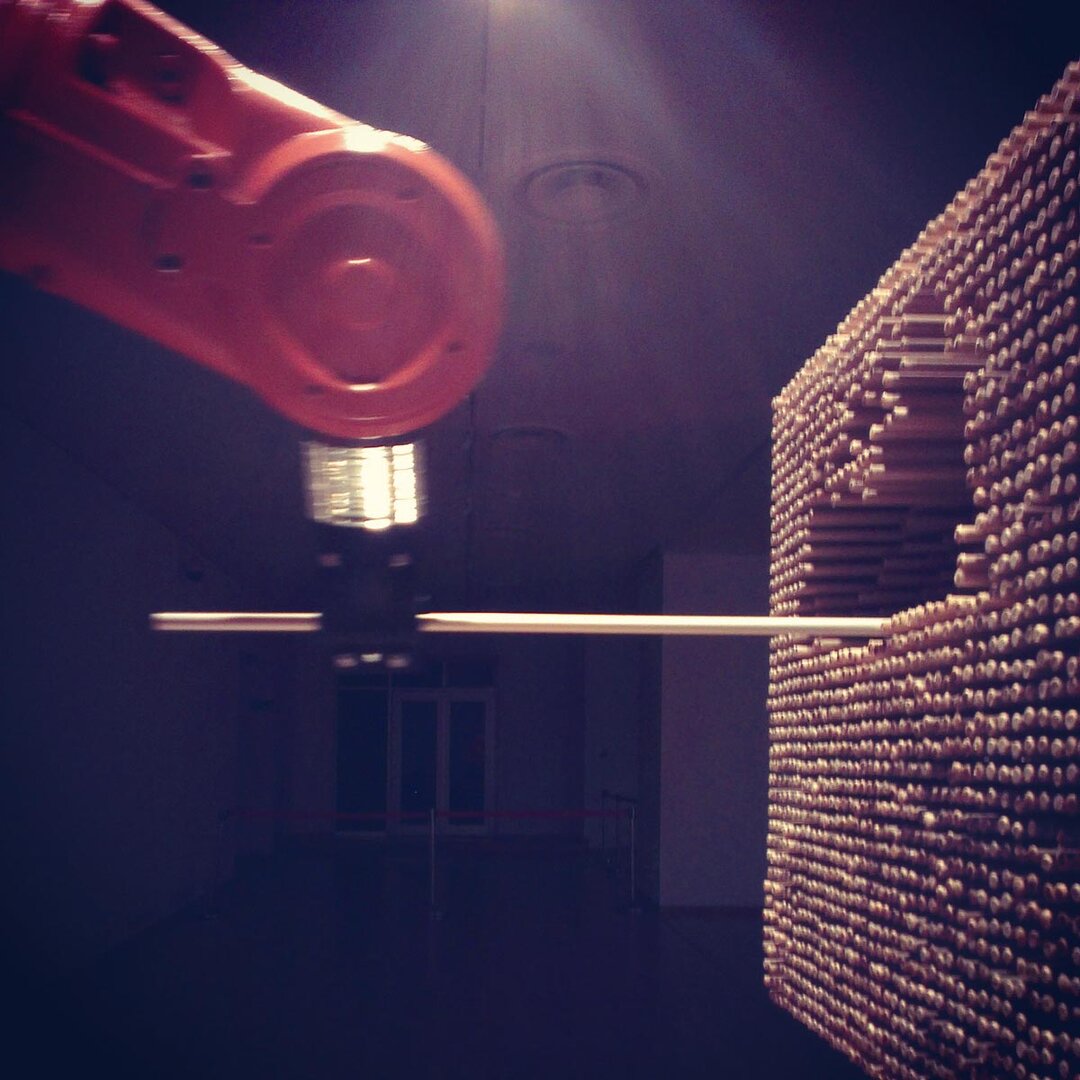
ROBOTIC PIXELS
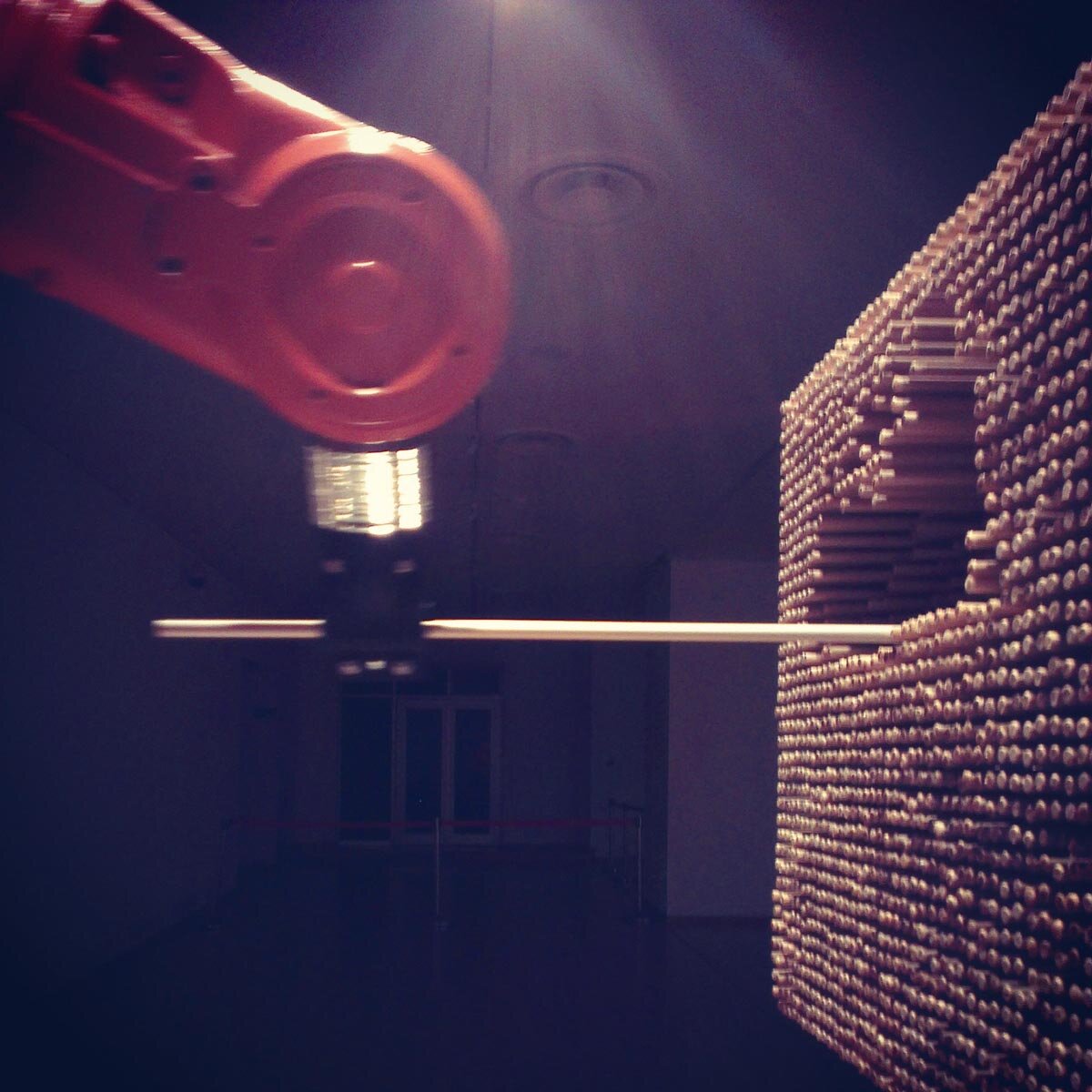
Technology helps us to interact, to connect with each other, to collaborate despite the great physical distances between people. The bond thus created is often a virtual one. The Robotic Pixels installation aims to physically link four different cities through digital technology. In this case, the link between the places leaves the virtual environment and will be physically manifested by an industrial robot.
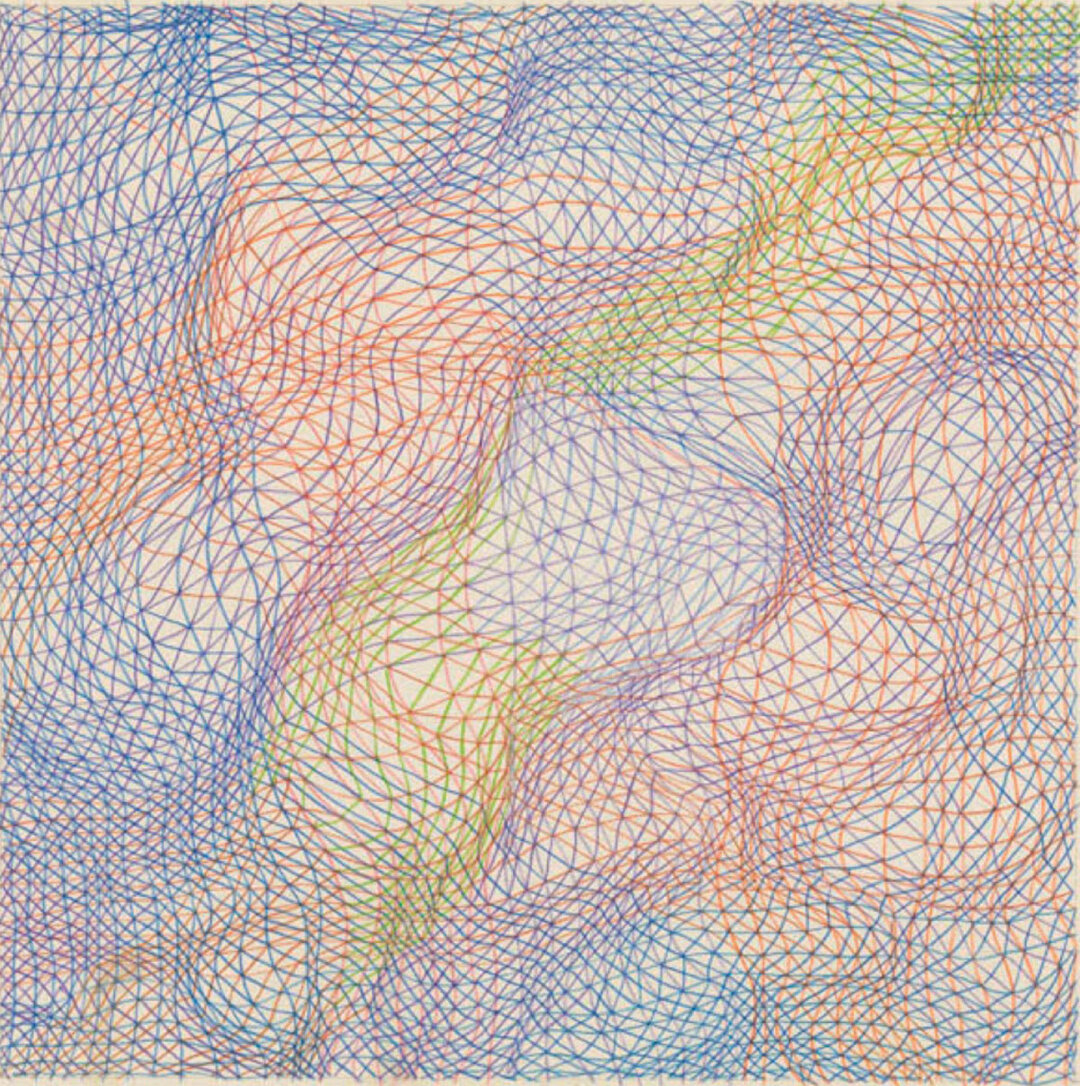
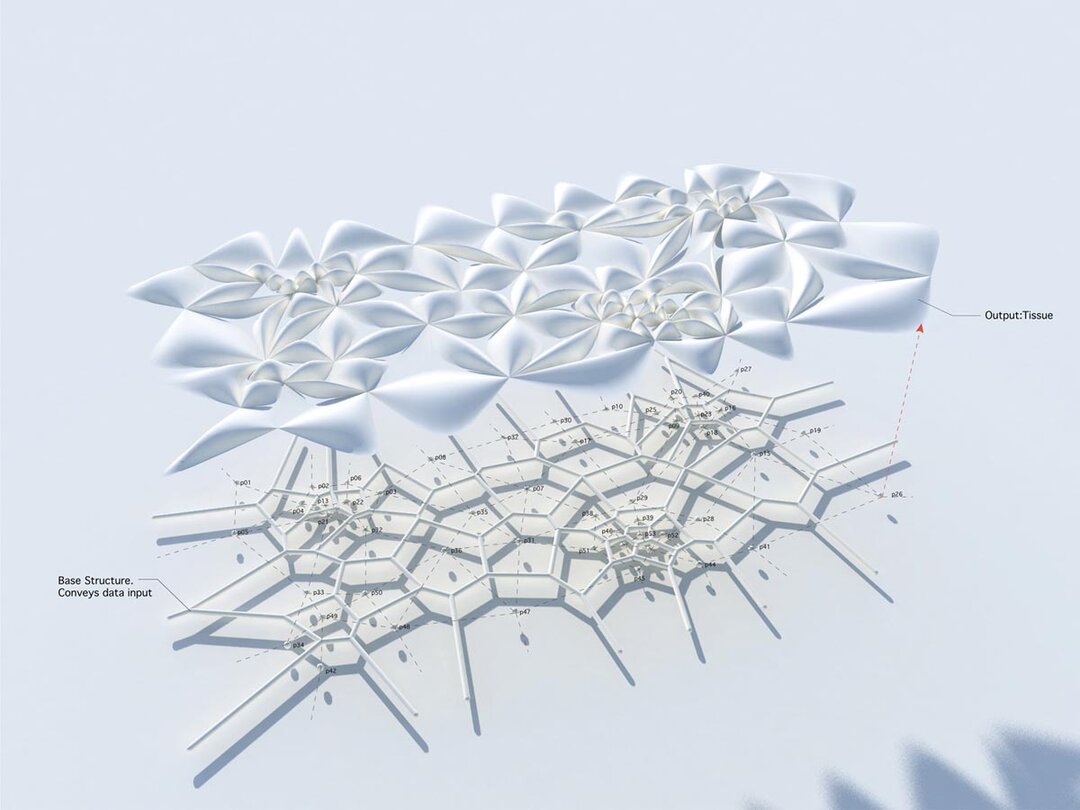
In the Robotic Pixels installation, the inhabitants of the four cities will have the chance to physically translate their presence into the exhibition space in Bucharest. The installation is conceived as a closed cycle, activated through interaction with users. The process starts with transposing the topography of the face into the virtual environment through 3D scanning. The information is passed through specific digital filters and abstracted so that it can be picked up by an industrial robot that will physically recompose the three-dimensional presence in the Bucharest space. The connection loop is closed by transforming the visitor with active input into a witness of the rematerialization process. They can visualize in real time the robot's movements leading to the formation of the three-dimensional image.
Robotic Pixels explores how humans can interact with industrial technologies that are becoming sensitive. The robot is adapted and programmed to be used in a creative and open communicative way. Although the installation integrates multidisciplinary technologies, the focus is on active transformation and emotional connection. Robotic Pixels encourages a different experience of communication, challenging the space-time relationship through simultaneous presence in multiple places.
Two rows of software applications run the system, one for the sites that scans people's faces via Kinect sensors and a central server application that processes the data received from the other applications and sends the motion information to the industrial robot. On the robot controller is a third software part that interprets the motion information and actuates the robotic hand.
NOTES
1 Sigrid Brell-Cokcan and Johannes Braumann (eds.), 'Introduction', in Rob|Arch 2012: Robotic Fabrication in Architecture, Art and Design, New York: Springer, p. 8.
2 David Pigram, Iaim Maxwell, Wes Mcgee, Ben Hagenhofer-Daniell, and Lauren Vasey, "Protocols, Pathways and Production," in Rob|Arch 2012: Robotic Fabrication in Architecture, Art and Design, ed. Sigrid Brell-Cokcan and Johannes Braumann, New York: Springer, p. 147.
3 Dana Tănase and Ionuț Anton, "The influence of digital tools on architecture", in "Arhitectura", no. 2/2014, p. 77.