VES-EL - Design: Gareth Neal & Zaha Hadid

Today's manufacturing and construction methods allow a radically different view of design compared to conventional methods. The increasing automation and precision of certain manufacturing technologies, such as industrial robots or CNC procedures, have enabled the production of high performance systems. On the other hand, changes in production methods also require rethinking design methods and paradigms. In manufacturing, performance can only be achieved if the methods, constraints and potentials are clearly articulated and embedded in the design phase, not after the design is completed.
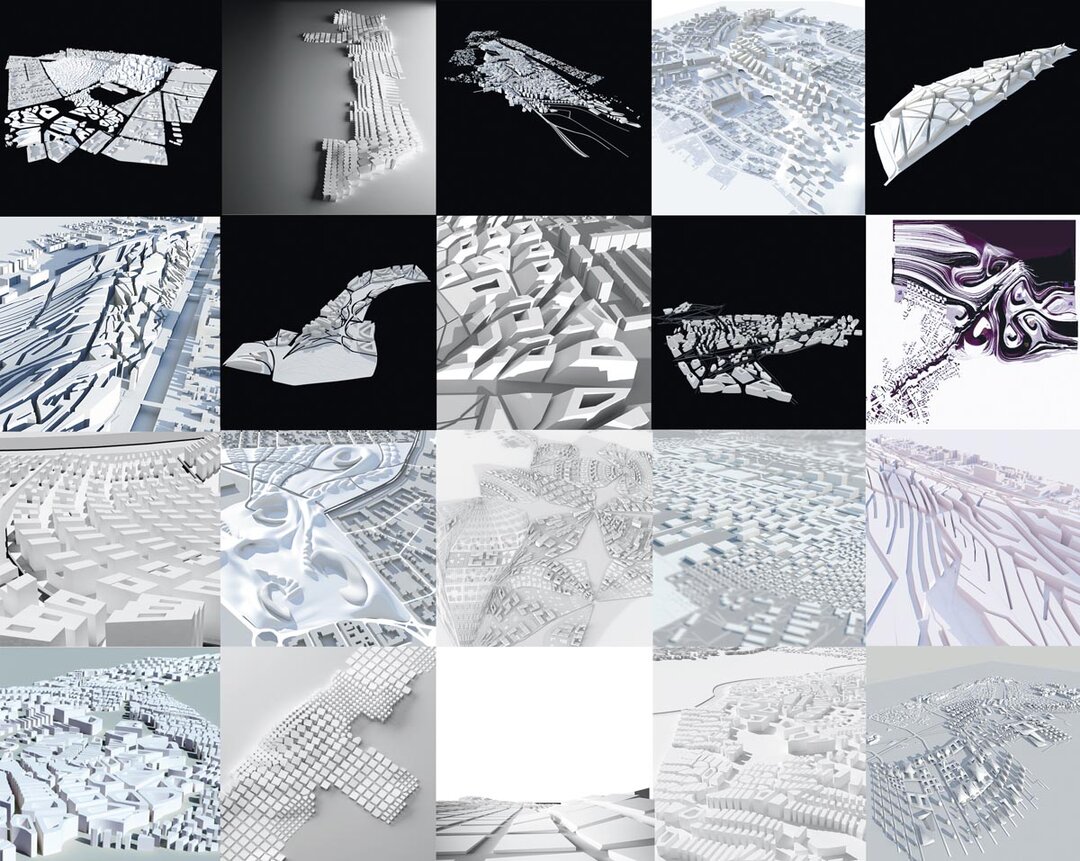
Traditionally, architectural design follows a top-down path, where material and production considerations are generally subordinated to an independently predefined geometric solution. By developing bottom-up design strategies based on various parameters, both the design development and the materialization process can be integrated as factors of equal value.
The use of algorithmic generative methods and open design systems that can relate and react to external parameters enables the development of high-performance systems that directly incorporate and benefit from the potential of digital manufacturing methods.
The ICD/ITKE Research Pavilion 2013-14 is part of an outstanding series of research pavilions developed at the University of Stuttgart, which illustrate the potential of new design, simulation and manufacturing processes in architecture. The project was planned and built over a year and a half by several students and researchers working with a multidisciplinary team of biologists, paleontologists, architects and engineers.
The Pavilion presents abottom-up approach based on multiple investigations conducted in parallel, exemplifying how the concurrent investigation of biomimetic principles and innovative manufacturing methods leads to an integrative design process that brings together parameters such as biological principles, material properties, structural performance and manufacturing constraints within a computerized design environment.
Therefore, the functional principles of natural fiber structures were analyzed and extracted, and through the development of a customized robotic manufacturing method they were translated into a modular pavilion prototype.
Biomimetic research
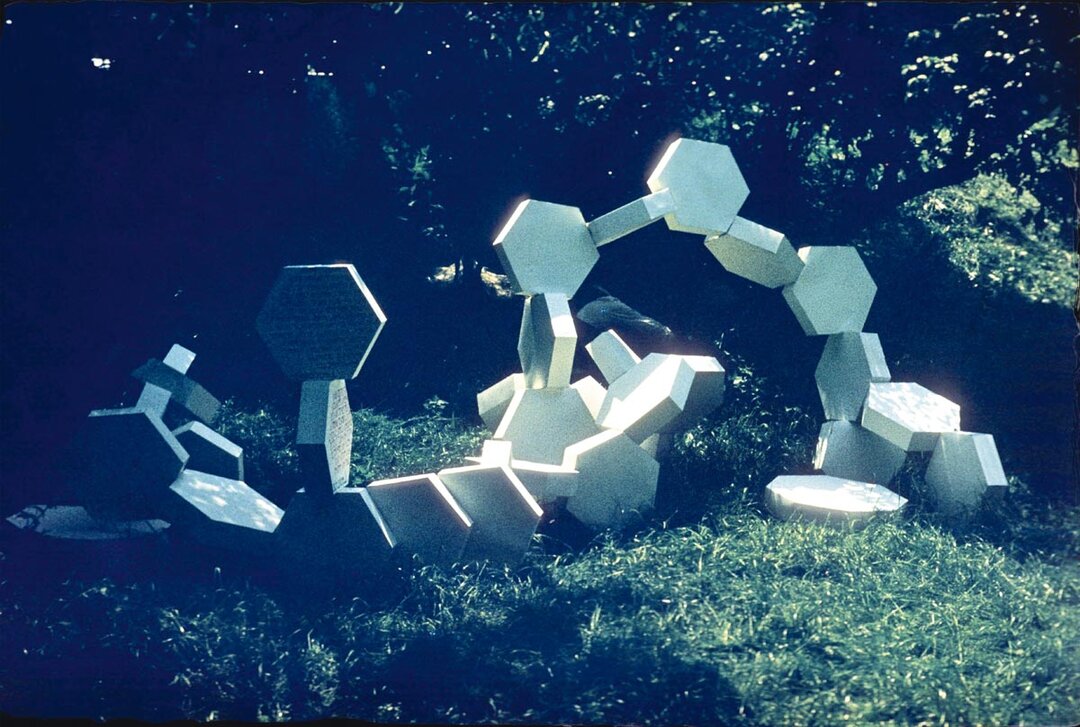
Through an interdisciplinary collaboration between architects and engineers at the University of Stuttgart and biologists at the University of Tübingen, various lightweight natural structures were investigated in an attempt to identify a number of principles that can be extracted and applied to architectural interventions. The carapace that protects the elytra and abdomen of coleopteran beetles was shown to have excellent structural properties and a high degree of material efficiency. Its performance is mainly based on the morphology of the two-layer system and the anisotropic characteristics of the fibrous material that allow for locally differentiated structural properties.
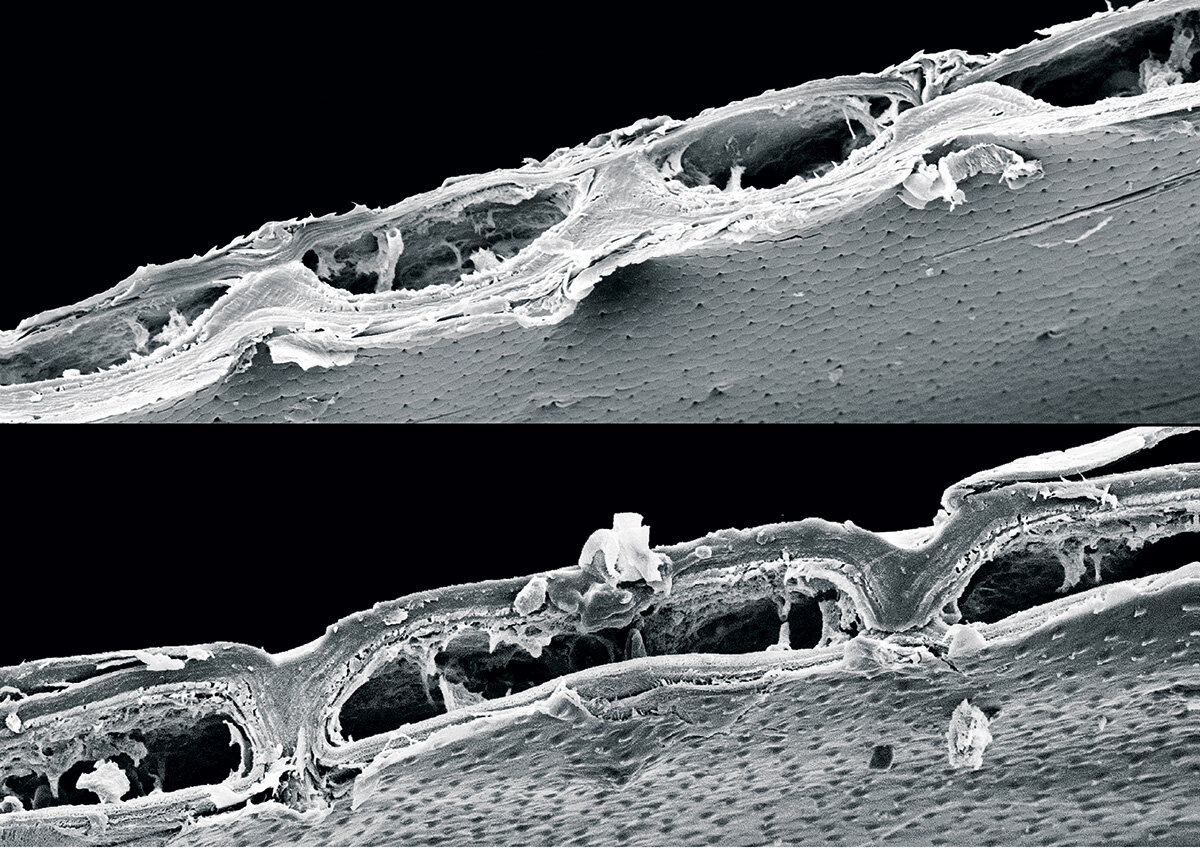
In collaboration with the ANKA Synchrotron Radiation Center and the Institute for Photon Science and Synchrotron Radiation at the Karlsruhe Institute of Technology (KIT), a highly detailed analysis of the morphology of the elytra of various coleopteran species was carried out using microcomputer tomography images. The images obtained by scanning electron microscopes (SEM) at Tübingen provided detailed information on the arrangement of fibers at the microscopic level. The morphology of the elytra consists of a two-layered structure which are connected by a series of double curved, columnar-like supporting elements, the trabeculae. The trabeculae join the upper wing segment to the lower wing segment and are made up of continuously arranged fibers. The morphological and structural differentiation identified occurs in the overall arrangement of the trabeculae in the general system and in the local position, density and orientation of the chitinous fibers. By translating these principles into geometrical rules, these essential morphological features of coleopteran elytra could be integrated into computerized design tools and could form the morphological basis of flag geometry.
Material and structural logic
In parallel with the biomimicry research, detailed investigations on a possible system of materials and manufacturing techniques have been carried out in a second bottom-up process. Here, the material is not simply applied to a predefined shape; it merely defines the geometric boundaries and the characteristics determined by them, providing a spatial solution and establishing constraints and working parameters for the design process. This leads to an overall geometric result which is a consequence of the material properties and the manufacturing method developed.
Glass and carbon fiber reinforced polymers have been identified as a material with great potential, primarily due to their high strength to weight ratio, resulting in extremely low mass constructions, and their significant potential to generate differentiation through the customized arrangement of fibers. Added to these characteristics is their unlimited patterning capability, which makes fiber-reinforced polymers the most suitable material for the production of complex geometries and individual anisotropic materials for the implementation of abstract geometric principles. Standard manufacturing techniques rely in most cases on the manual application of fibers to complex prefabricated molds, a costly, time-consuming and inefficient method for individual architectural designs.
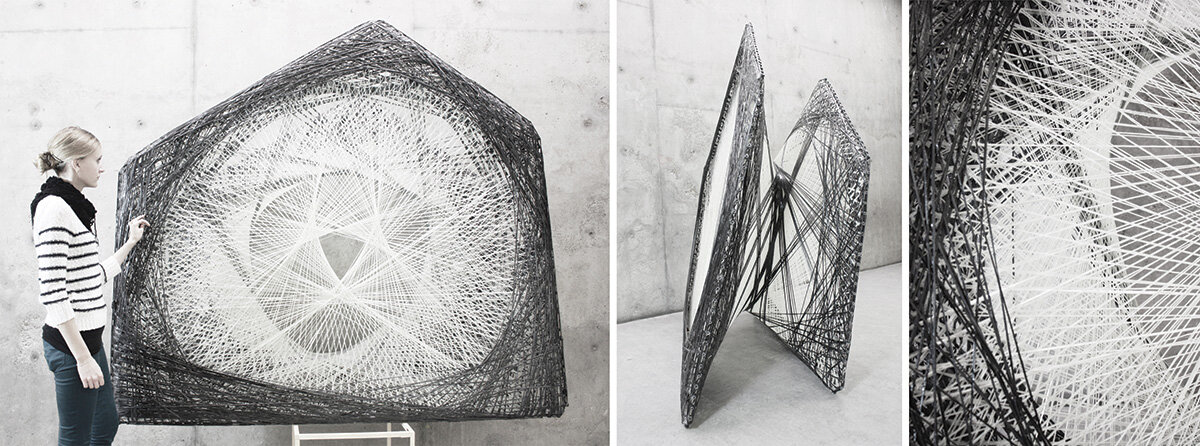
As a consequence of this, a robotized coreless twisting method has been developed that reduces the required formwork to a reusable frame and allows the production of complex geometric modules with anticlastic curvature. In order to be able to translate the morphology of the coleopter trabeculae into a geometric component, fibers are helically wrapped around the two frames of the component. The resulting double curved geometry is just a consequence of the material properties, the interaction between the fibers. As a result of the continuous winding between the two frames, the linear fibers receive tension from the fibers twisted before and after them, forcing the material to constantly negotiate a state of equilibrium throughout the manufacturing process. This results in a geometry that is the pure consequence of the interaction between the materials and that has not been predefined as a whole, but as a set of construction parameters.
At the same time, the development of an automated method of twisting with the help of robots allows highly efficient differentiation of how the fibers are arranged within a component or between different components.
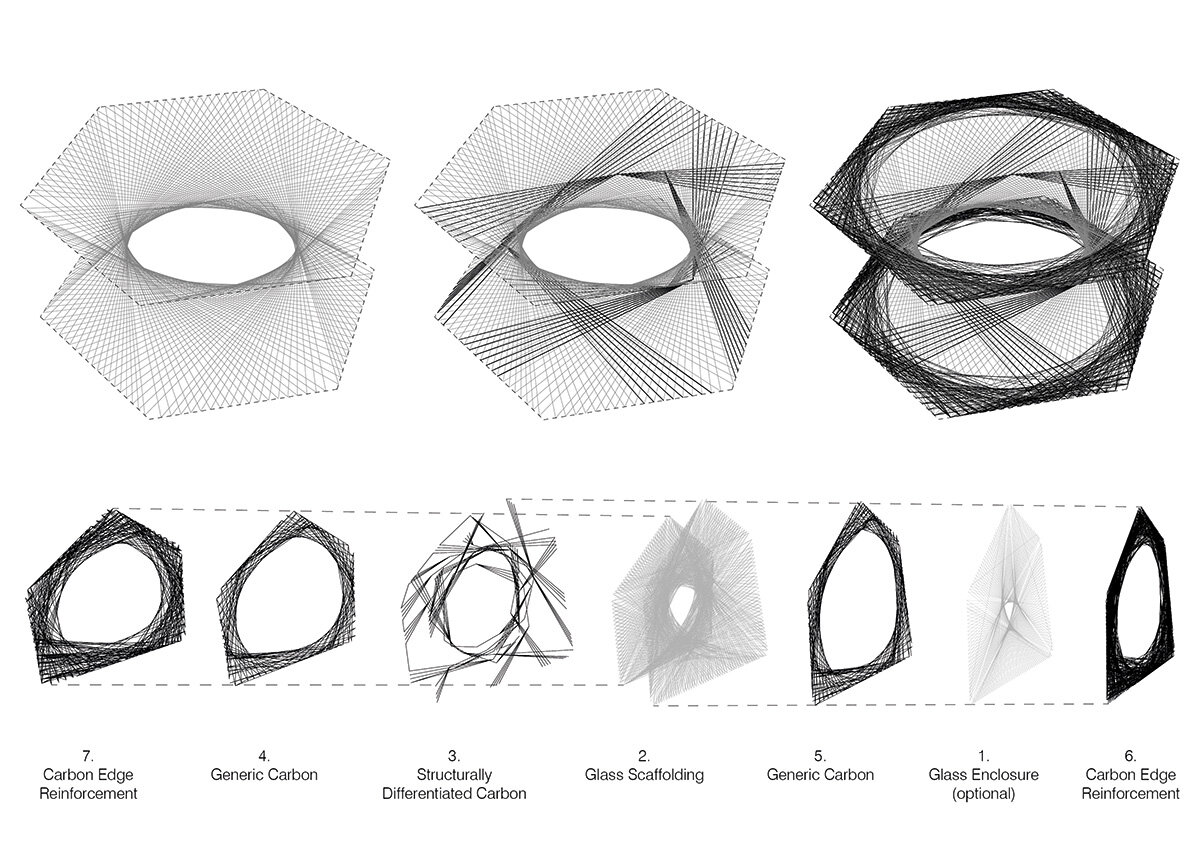
In order to manufacture the 36 individual elements, it was mandatory to define a parametric twisting syntax that could be automatically applied to the edges of each component. To this end, a set of rules was developed and tested against parameters such as the topology and dimensions of the components, the angles between the edges, the distance between the inner and outer layers, the maximum degree of non-planarity and the degrees of openness of the components. After numerous manual twisting tests, digital simulations and robotic twisting experiments, a logic tailored to the fiber sequence was developed and further refined throughout the entire research process. Each element involved the twisting of three different layers: the glass fiber layer first for shape generation, the generic carbon fiber layer in the edge build-up, and the carbon fiber layer for structural reinforcement specific to each component. During the twisting of all the layers, a proper bond between the fibers had to be ensured at all times, so that the resulting geometry would be structurally active. The first layer of carbon fibers additionally allows differentiation of the applied fibers by depth and intensity, depending on the resulting local forces in the area of the component edges. An FE simulation provides the necessary information for the differentiation of fiber density as well as a technological diagram of the global forces individually influencing the second carbon fiber layer that reinforces the connection between the two sheathing layers according to the provided force flow.
Robotic manufacturing
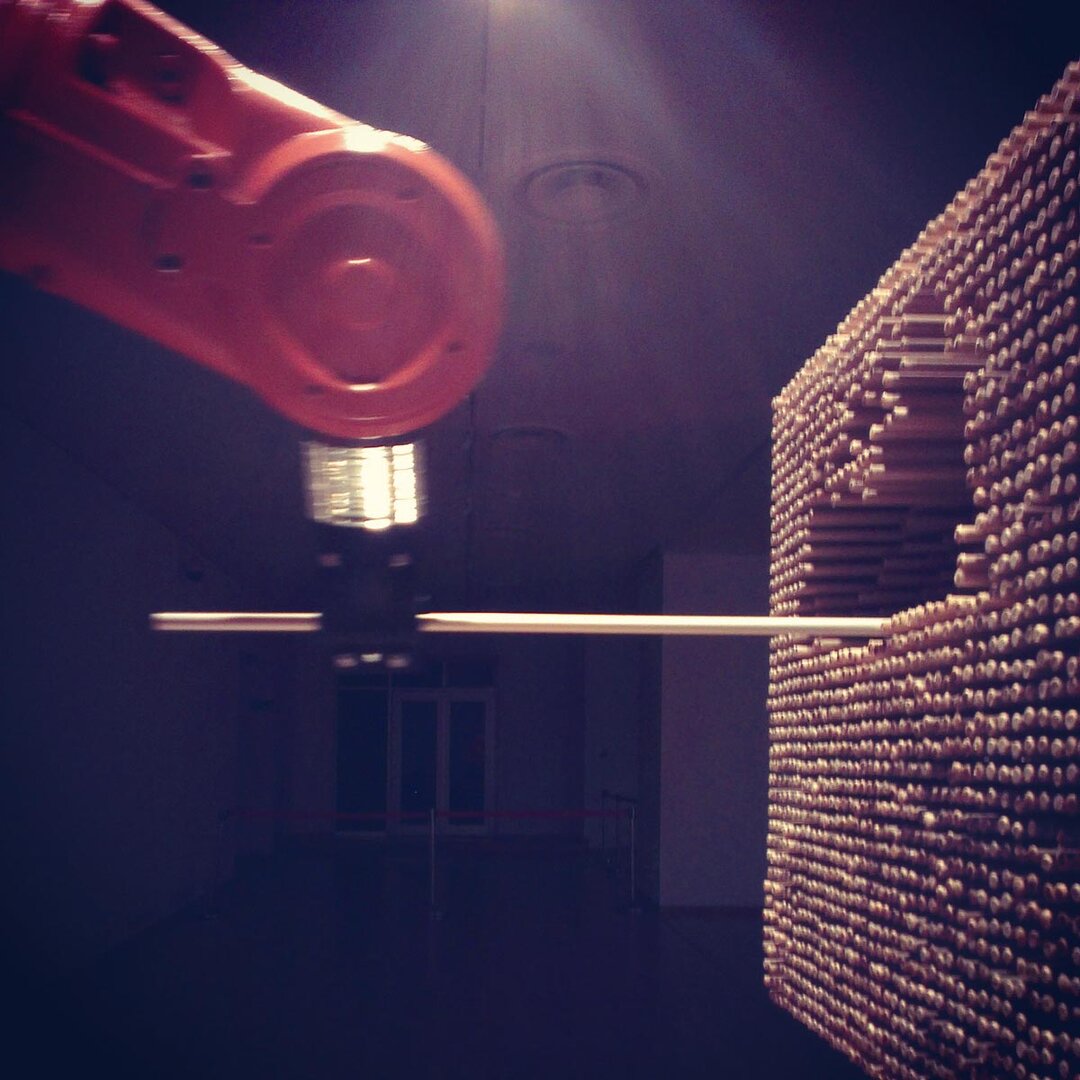
A special robotic twisting method has been developed for the manufacture of the double curved, geometrically unique components, which involves the use of two 6-axis industrial robots to twist the fibers between two custom-made steel frames supported by the robots. The manufacturing stage itself becomes an integral part of the design and materialization process, since it has to provide the set of parameters and limitations needed in the design stage. The objective has been to create an environment that provides as much geometric freedom as possible for the production of fiber composite geometries, while minimizing the complexity and amount of materials used. The end-effectors, which define the portion of the edge of the components on which the fibers are twisted, were constructed from rectangular steel telescoping profiles and could be adapted and reused on a component-by-component basis.
Throughout the twisting process, the resin-impregnated fibers were twisted around the two frames by the synchronous movement of the two robots and the edge frames. The use of two robots allowed the twisting of the elements without any interstitial structure, ensuring the stability and accuracy of both frames while keeping the complexity of the robot control strategy low, as both robots executed parallel motions.
Due to the reusability of the effector frames, as well as the reduction of the required formwork, the coreless twisting technique allowed maximum material and resource savings while producing differentiated and geometrically complex components.
The biomimetic prototype
A total of 36 individual elements were fabricated, whose geometry was based on structural principles extracted from coleopteran elytra. Each component has a specific fibrous structure, resulting in an efficient load-bearing system. The largest element is 2.6 meters in diameter and weighs only 24.1 kg. The research pavilion covers a total area of 50 m² and has a volume of 122 m³ and a weight of 593 kg.
The overall geometry reacts to the specific conditions of the public space around the university building, which is located close to the park. At the same time, it demonstrates the morphological adaptability of the system by generating more complex spatial arrangements than those existing in a simple shell structure. The Pavilion demonstrates, practically, how computer synthesis of structural biology principles and the complex interrelationships between material, form and robotic fabrication can lead to innovative construction methods using fiber composite materials. At the same time, the multidisciplinary approach not only leads to low-mass, high-performance and material-efficient constructions, but also explores new spatial qualities and expands the tectonic possibilities of architecture.
Today's fabrication and construction methods enable a radically different view on design then conventional design methods. Through the automation and increased precision of fabrication technologies such as the use of industrial robots or CNC procedures, building systems with a highly increased performance are now enabled to be produced. The shift in the production methods though requires a parallel rethinking of design methodologies and paradigms. Performance on a manufacturing level can only be achieved if the methods, constraints and potentials are clearly articulated in the design process and are informing it during the planning and not after the design phase has been completed.
Traditionally architectural design has followed top down design processes in which material and fabrication considerations are usually subordinated to an independently predefined geometric solution. Through the development of bottom-up design strategies, which can build upon various parameters, both the design development and the materialization process can be integrated as equal drivers.
The use of algorithmic generative methods and open design systems that are able to relate and react to external parameters enable the development of performative systems that directly embed and benefit from the potentials of digital fabrication methods.
The ICD/ITKE Research Pavilion 2013-14 is part of a successful series of research pavilions developed at the University of Stuttgart which showcase the potential of novel design, simulation and fabrication processes in architecture. The project was planned and constructed within one and a half years by students and researchers within a multidisciplinary team of biologists, palaeontologists, architects and engineers.
The pavilion presents a design approach based on multiple parallel bottom-up investigations, exemplifying how concurrent research on biomimetic principles and innovative fabrication methods lead to an integrative design process that brings together parameters such as biological principles, material properties, structural performance and fabrication constraints in a computational design setup.
Therefore functional principles of natural fiber-based structures were analyzed, abstracted and through the development of a custom robotic fabrication method, translated into a modular prototype pavilion.
Biomimetic Investigation
Through an interdisciplinary collaboration between architects and engineers from Stuttgart University and biologists from Tübingen University various natural lightweight structures were investigated in an attempt to find principles that are abstractable and applicable to architectural implementations. The beetles Elytron, the protective shell of the beetle's wings and abdomen, proved to have excellent structural properties and a high material efficiency. Their performance rely strongly on the morphology of a double-layered system and the anisotropic characteristics of the fiber bades material which allows for locally differentiated material properties.
In cooperation with the ANKA Synchrotron radiation Facility and the Institute for Photon Science and Synchrotron Radiation at the Karlsruhe Institute of Technology (KIT), a highly detailed analysis of various Beetles Elytra morphology was achieved through micro computed tomography images. SEM scans from Tübingen provided detailed information on the fiber arrangements on a microscopic level. The Elytra morphology is based on a double layered structure which is connected by column-like doubly curved support elements, the trabeculae. . The fiber layout within a trabecula merges the upper and lower shell segments with continuous fibers. The hereby identified structural structural morphological differentiation appears on the global arrangement of trabeculae in the overall system and the local position, density and orientation of the chitin fibers. Through the translation of these principles in geometric rules these underlying specificities of the beetles Elytra morphologies could be integrated into the computational design tool and define the morphological foundation for the pavilions geometry.
Material and Structural Logic
Parallel to the biomimetic investigation, extensive research on a possible material system and fabrication techniques was conducted in a second bottom-up process. Hereby, the material is not simply applied to a predefined shape, it is solely defining the geometric range and characteristics defined by it, providing a solution space and setting constraints and working parameters for the design process. This leads to a global geometric outcome that is a consequence and not a ... of the material properties and the developed fabrication method.
Glass and carbon fiber reinforced polymers have been identified as a material with great potential, on the one hand for their high weight to strength ratio, which leads to extremely lightweight constructions, and on the other hand their high potential for generating differentiation through custom fiber laying. Together with their unrestrained moldability these characteristics make fiber reinforced polymers highly suitable for the manufacturing of complex geometries and individual anisotropic material definition needed for the implementation of the abstracted geometric principles. Standard fabrication techniques rely on the, in many cases, manual application of fibers to a prefabricated complex mold, a method that proves to be time and cost intensive and inefficient for individual architectural tasks.
As a consequence a core-less robotic winding method was developed, which minimizes the necessary formwork to a reusable frame and enables geometrically complex modules with anticlastic curvature to be produced. For the translation of the beetle trabeculae morphology into a component geometry, fibers are helically wound around the component's two frames. The resulting doubly curved geometry is purely the result of the materials properties, the fiber fiber interaction. Through the continuous subsequent winding between the two frames, the linear fibers get tensioned by the previously layed fibers and by the ones that follow, requiring the material to constantly negotiate a state of equilibrium throughout the fabrication process. This results in a geometry that is the pure consequence of the material interaction and has not been predefined as a whole, but as a set of frame parameters.
At the same time the development of an automatic robotic winding method enables an efficient was of highly differentiating the fiber layout throughout one component or between different ones.
For the fabrication of 36 individual elements the definition of a parametric winding syntax, which can be automatically applied to each component's boundary definition, was mandatory. For this purpose, a set of rules was developed and tested based on parameters such as topology and component dimensions, angles between edges, distance between inner and outer layer, maximum degree of non-planarity and opening degrees of the components. Through numerous hand-winding tests, digital simulation and robotic winding experiments, an appropriate logic for the fiber layout sequence was developed and refined throughout the whole research process. Each element required three different layers of winding, a form giving first glass- fiber layer, a generic carbon fiber edge reinforcement layer and a component specific structural reinforcement carbon fiber layer. Throughout the winding of all layers, a proper fiber to fiber bond needs to be constantly ensured, in order for the resulting geometry to be structurally active. The first carbon fiber layer additionally allows a differentiation of the depth and density of the applied fibers depending on the resulting local forces around the components edges. An FE simulation provides the necessary information for the differentiation of the fiber density, as well as a global force flow diagram that individually informs the second carbon fiber layer which reinforces the connection between the two layers of the shell according to the provided force flow.
Robotic Fabrication
For the fabrication of the geometrically unique , double curved components, an individual robotic winding method was developed, which uses two collaborating 6-axis industrial robots to wind fibers between two custom made steel frames held by the robots. The fabrication setup itself becomes an integral part of the design and materialisation process, since it needs to inform the design with its range of parameters and limitations. The goal was to develop a setup that provides as much geometric freedom as possible for the production of distinct fibre composite geometries while minimizing its complexity and material usage. The effectors, which define the components boundary on which the fibers are wound, were built from telescopic rectangular steel profiles and could be adapted and reused for every component.
Throughout the winding process, the resin impregnated fiber is being wound around the two frames through the synchronous movement of the two robots and thus boundary frames. The use of two robots allowed the winding of the elements without any interstitial structure, ensuring stability and precision of both frames, while keeping the robotic control strategy's complexity low, as both robots perform parallel movements.
The reusability of the effector frames as well as the reduction of the necessary formwork make the core-less winding technique a very material efficient and resource saving technique at the same time producing components with great geometric complexity and material differentiation.
Biomimetic Prototype
In total 36 individual elements were fabricated, whose geometries are based on structural principles abstracted from the beetle elytra. Each of them has an individual fiber layout which results in a material efficient load-bearing system. The biggest element has a 2.6 m diameter with a weight of only 24.1 kg. The research pavilion covers a total area of 50 m² and a volume of 122 m³ with a weight of 593 kg.
The overall geometry reacts to site-specific conditions of the public space around the university building in close proximity to the park. At the same time it demonstrates the morphologic adaptability of the system, by generating more complex spatial arrangements than a simple shell structure. Altogether the research pavilion shows how the computational synthesis of biological structural principles and the complex reciprocities between material, form and robotic fabrication can lead to the generation of innovative fiber composite construction methods. At the same time the multidisciplinary research approach does not only lead to performative and material efficient lightweight constructions, it also explores novel spatial qualities and expands the tectonic possibilities of architecture.




Project team
Institute for Computer Design: prof. Achim Menges
Institute of Building Structures and Structural Design: Prof. Jan Knippers
R&D and project management team: Moritz Dörstelmann, Vassilios Kirtzakis, Stefana Parascho, Marshall Prado, Tobias Schwinn
Concept development: Leyla Yunis
System development and realization:
WiSe 2012 - SoSe2013: Desislava Angelova, Hans-Christian Bäcker, Maximilian Fichter, Eugen Grass, Michael Herrick, Nam Hoang, Alejandro Jaramillo, Norbert Jundt, Taichi Kuma, Ondrej Kyjánek, Sophia Leistner, Luca Menghini, Claire Milnes, Martin Nautrup, Gergana Rusenova, Petar Trassiev, Sascha Vallon, Shiyu Wie
WiSe 2013: Hassan Abbasi, Yassmin Al-Khasawneh, Desislava Angelova, Yuliya Baranovskaya, Marta Besalu, Giulio Brugnaro, Elena Chiridnik, Eva Espuny, Matthias Helmreich, Julian Höll, Shim Karmin, Georgi Kazlachev, Sebastian Kröner, VangelKukov, David Leon, Stephen Maher, Amanda Moore, Paul Poinet, Roland Sandoval, Emily Scoones, Djordje Stanojevic, Andrei Stoiculescu, Kenryo Takahashi, Maria Yablonina supported by Michael Preisack
In cooperation with the Institute of Evolution and Ecology, Evolutionary Biology of Invertebrates, University of Tübingen: Prof. Oliver Betz
Department of Geosciences, Invertebrate Paleontology and Paleoclimatology, University of Tübingen: Prof. James H. Nebelsick
University of Tübingen, Module Bionics of Animal Construction, WiSe 2012 - Gerald Buck, Michael Münster, Valentin Grau, Anne Buhl, Markus Maisch, Matthias Loose, Irene Viola Baumann, Carina Meiser
ANKA/ Institute for Photon Science and Synchrotron Radiation
Karlsruhe Institute of Technology (KIT): Dr. Thomas van de Kamp, Tomy dos Santos Rolo, Prof. Dr. Tilo Baumbach
Institute for Machine Tools
University of Stuttgart: dr. eng. Thomas Stehle, Rolf Bauer, Michael Reichersdörfer
Institute of Textile Technology and Process Engineering ITV Denkendorf: Dr. Markus Milwich
Project information: completion date - March 2014;
area 50mp m²;
volume 122 m³;
Details: